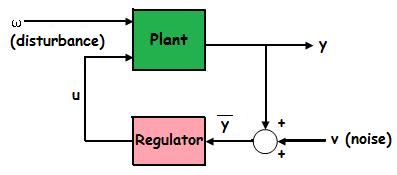
The LQG control is a modern state-space technique for designing optimal dynamic regulators that allows the trade off regulation performance and control effort, and to take into account process disturbances and measurement noise. Furthermore, to design this controller, a state-space model of the plant will be required. The LQG regulator consists of an optimal state-feedback gain and a Kalman state estimator where these two components can be designed independently.
Such control employs the LQG optimal control theory, which is a controller design methodology that enables a controller to be synthesized and takes into account the presence of Gaussian white nose disturbances acting on the system. In many practical control problems, the system of model is usually subjected to disturbances and measurement noise, which are most naturally modeled as stochastic white noise processes. Hence, this controller possess several advantages, such as:
- ability to provide a systematic way of synthesizing multiple inputs and outputs control systems in order to optimize the control system performances.
- helps to improve the dynamic performances processof a plant after the fault condition.
- more accurate as it takes into account the disturbances and measurement noise.
However, a major disadvantage of this controller is due to its reliance on the use of an accurate dynamical model for the process to be controlled but most of the models in real practice are subjected to errors. Hence, this control system needs to be designed to be robust against modeling errors.